یکشنبه، 25 آبان ماه 1404 = 16-11 2025
ساخت سیستم ناوبری الهامگرفته از حیوانات برای جهت یابی بدون GPS
پژوهشگران یک سیستم ناوبری جدید بدون نیاز به GPS ساختهاند که بر اساس نحوه جهتیابی برخی حیوانات کار میکند. به گزارش تکناک، این سیستم میتواند به رباتها برای حرکت در محیطهایی کمک کند که سامانه سنتی موقعیتیاب جهانی GPS عملکرد ضعیفی دارد.
در حال حاضر سامانههای ناوبری غیر GPS مانند دوربینها و حسگرها زمانی که دید کم باشد دچار خطا میشوند و ممکن است در میدان عملیاتی کثیف شوند یا آسیب ببینند.
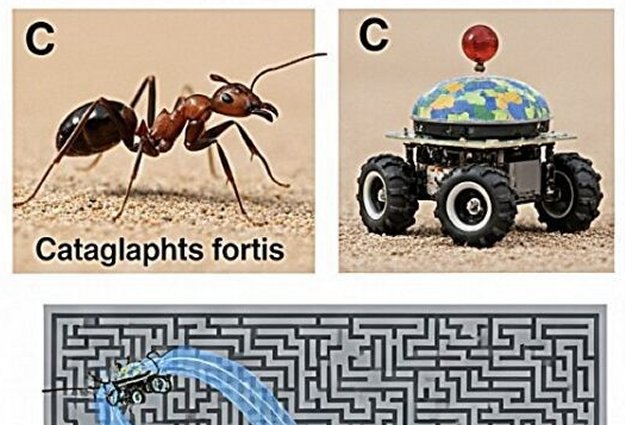
از آنجا که حیواناتی مانند مورچهها، راهبردهای بسیار پیشرفتهای برای جهتیابی در محیطهای آشفته تکامل دادهاند، گزینهای مناسب برای الگوبرداری در روشهای جایگزین محسوب میشوند.
ایده اصلی این سامانه بر مفهومی زیستی به نام “Degeneracy” استوار است. در این سازوکار، چند سامانه مستقل به شکلی همپوشان کار مشابهی انجام میدهند تا در صورت از کار افتادن یکی، سامانههای دیگر بلافاصله نقش آن را جبران کنند. پژوهشگران این ساختار را به کمک سه مدل الهامگرفته از حیوانات پیاده کردهاند؛ که شامل مورچهها، پرندگان و جوندگان میشوند.
نخستین بخش از این سیستم ناوبری بدون GPS به مورچهها مربوط میشود. مورچهها به کمک شمارش گامها و جهت حرکت، موقعیت خود را نسبت به لانه تشخیص میدهند و حتی در محیطهای آشفته مسیر را گم نمیکنند. پژوهشگران بر همین اساس یک شبکه عصبی اسپایکینگ کممصرف طراحی کردهاند که نقش یک گامشمار فوقدقیق را بر عهده دارد. این سختافزار حتی زمانی به کار خود ادامه میدهد که حسگرها پر از نویز و دادههای مخدوش هستند و تغییر موقعیت ربات را با دقت نسبی ثبت میکند.
سامانه ناوبری جدیدی که از رفتار مورچهها الهام گرفته است، در بیابان خیلی دقیقتر از روشهای معمول کار میکند. در نمودار خط قرمز روش الهامگرفته از مورچهها است. خط آبی روش معمول دوربین و حسگرهای حرکتی است. خط قرمز همیشه پایینتر است، یعنی ربات کمتر گم میشود و خطای موقعیتیابی آن خیلی کمتر است.
دومین بخش سیستم ناوبری بدون GPS از روش جهتیابی پرندگان مهاجر الهام گرفته است. پرندگان برای یافتن مسیر از مجموعهای از نشانههای طبیعی، از تشخیص میدان مغناطیسی زمین گرفته تا رصد نور قطبیشده و الگوی روشنایی آسمان بهره میبرند. همچنین آنها از موقعیت خورشید و نشانههای بصری سطح زمین بهره میبرند تا جهت دقیق سفر را بیابند. تیم پژوهشی توانسته است این تواناییها را با یک مگنتومتر کوانتومی شبیهسازی کند؛ حسگری که جهت میدان مغناطیسی را تشخیص میدهد و میتواند با ورودیهای دیگر مانند قطبنمای قطبیشدگی و دادههای دوربین ترکیب شود. این دادهها در یک فیلتر بیزی ادغام میشوند تا ربات در هر لحظه، تخمینی پایدار از موقعیت خود داشته باشد. اگر یکی از حسگرها دچار مشکل شود، مثلاً دوربین از کار بیفتد، دو حسگر دیگر بلافاصله کنترل را در دست میگیرند.
سومین بخش سیستم ناوبری بدون GPS الهامگرفته از حیوانات، برگرفته از توانایی موشها در ساخت «نقشههای شناختی» در بخش هیپوکامپ مغز است. موشها تنها زمانی نقشه ذهنی مسیر را تغییر میدهند که نشانه مهمی در محیط رخ دهد. این راهبرد به حفظ انرژی و کاهش پیچیدگی پردازش کمک میکند. روش تازه نیز از همین منطق پیروی میکند: ربات تنها هنگامی نقشه را بهروزرسانی میکند که نشانه جدید و قابلاعتماد دریافت شود. این روش در مقایسه با فرایند SLAM که مدام نقشه را گسترش و اصلاح میکند، کمتر انرژی مصرف میکند و از نظر محاسباتی بهینهتر است.
به گفته پژوهشگران، این سه سامانه در کنار هم میتوانند پایهگذار نسلی جدید از رباتهای مقاوم و خودکار باشند؛ رباتهایی که قادر هستند در محیطهای تاریک، غبارآلود، پرآشوب یا بدون دسترسی به GPS حرکت دقیق و قابل اعتماد داشته باشند. کاربرد چنین فناوریهایی گسترده است، که شامل عملیات جستوجو و نجات در ساختمانهای فرو ریخته، مأموریتهای فضایی مریخنوردها و رباتهای زیرآبی میشوند.
این سیستم ناوبری بدون GPS هنوز در مرحله نظری است، اما تیم پژوهشی در حال توسعه قابلیت یادگیری پیوسته روی تراشه است تا سامانه رفتاری شبیه مغز داشته باشد. شیکدر چاندان، نویسنده اول مقاله به Tech Xplore گفته است که وزنهای عصبی فعلی عمدتاً ثابت هستند، در حالی که سامانههای زیستی با کمک انعطافپذیری سیناپسی به طور دائم سازگار میشوند. وی تصریح کرد که تیم پژوهشی قصد دارد با فناوریهایی مانند سیناپسهای ممریستور این توانایی را به صورت مستقیم وارد سختافزار کند.
همچنین پژوهشگران امیدوار هستند که در آینده بتوانند نقشههایی در مقیاس چند کیلومتر بسازند و از الگوهای بیولوژیکی بیشتری برای افزایش دقت و پایداری ناوبری استفاده کنند. نسخه کامل این پژوهش در نشریه Cell منتشر شده است.
 English Summary
English SummaryResearchers have developed a new navigation system that works without GPS, inspired by how certain animals orient themselves. This system can help robots navigate in environments where traditional GPS is ineffective. Current non-GPS navigation systems, like cameras and sensors, often fail in low visibility. Drawing from ant navigation strategies, researchers created a low-power neural network that counts steps and maintains position even in noisy conditions. The system also mimics migratory birds' use of natural cues and quantifies magnetic fields. Lastly, it employs mice's ability to construct cognitive maps, updating only with significant environmental changes. This novel system promises to enhance robot performance in various challenging conditions. While still in the theoretical phase, ongoing development aims to integrate continuous learning, with hopes to improve accuracy and stability through more biological patterns.